Pesquisadores da Universidade Johns Hopkins deram um passo significativo na engenharia biomédica ao desenvolverem uma mão protética revolucionária, capaz de manusear objetos com uma precisão quase humana. O dispositivo é projetado para ajustar automaticamente sua pegada, evitando danos aos itens segurados e permitindo um controle mais natural para usuários com perda de membros.
Esse avanço inédito combina materiais rígidos e macios, criando um sistema híbrido que imita a estrutura e as funções da mão humana. Enquanto mãos robóticas tradicionais costumam ser excessivamente rígidas ou muito maleáveis, este novo design equilibra robustez e flexibilidade, tornando-se uma alternativa promissora para próteses de membros superiores. O estudo detalhando essa inovação foi publicado na revista Science Advances.
Segundo Sriramana Sankar, estudante de doutorado em engenharia biomédica da Johns Hopkins e líder do projeto, o objetivo desde o início foi criar uma prótese que simulasse as capacidades físicas e sensoriais da mão humana. "Queremos proporcionar às pessoas com perda de membro superior a capacidade de interagir com segurança e liberdade com seu ambiente, sentir e segurar seus entes queridos sem se preocupar em machucá-los", afirmou Sankar.
O dispositivo é resultado do trabalho do Laboratório de Neuroengenharia e Instrumentação Biomédica, o mesmo grupo que, em 2018, criou a primeira pele eletrônica capaz de sentir dor de forma semelhante à humana. Essa experiência anterior serviu de base para o avanço atual.
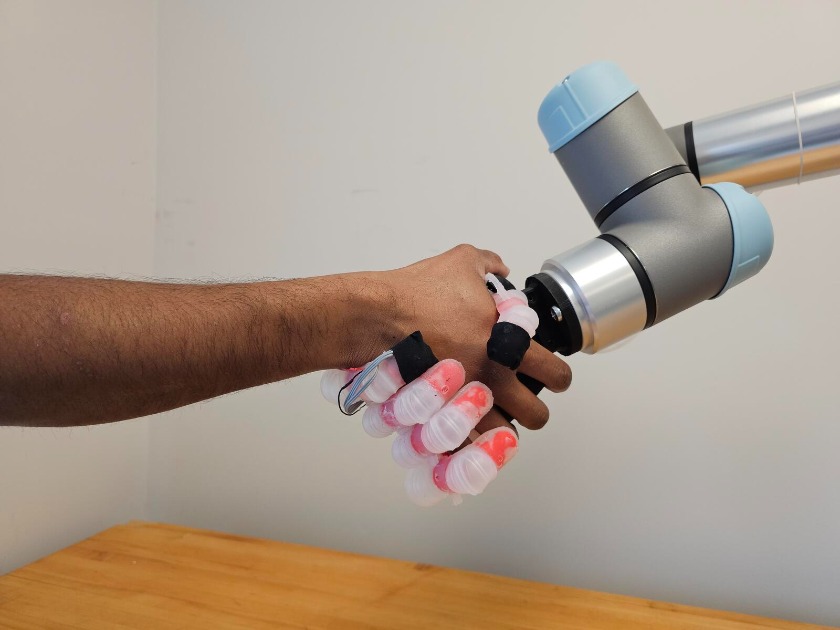
A estrutura da prótese combina polímeros maleáveis e um esqueleto rígido impresso em 3D, permitindo tanto força quanto flexibilidade no manuseio de objetos. Um dos grandes diferenciais é a inclusão de três camadas de sensores táteis, inspiradas nas camadas da pele humana. Esses sensores permitem que a prótese identifique a forma, a textura e a firmeza de diferentes objetos, em vez de apenas detectar o toque.
As articulações dos dedos são preenchidas com ar, o que possibilita um controle mais fluido. O dispositivo responde aos sinais enviados pelos músculos do antebraço, e algoritmos de inteligência artificial analisam os estímulos dos sensores, criando uma sensação de toque realista.
"A informação sensorial dos dedos é traduzida para a linguagem dos nervos para fornecer feedback sensorial naturalista por meio de estimulação elétrica nervosa", explicou Sankar.
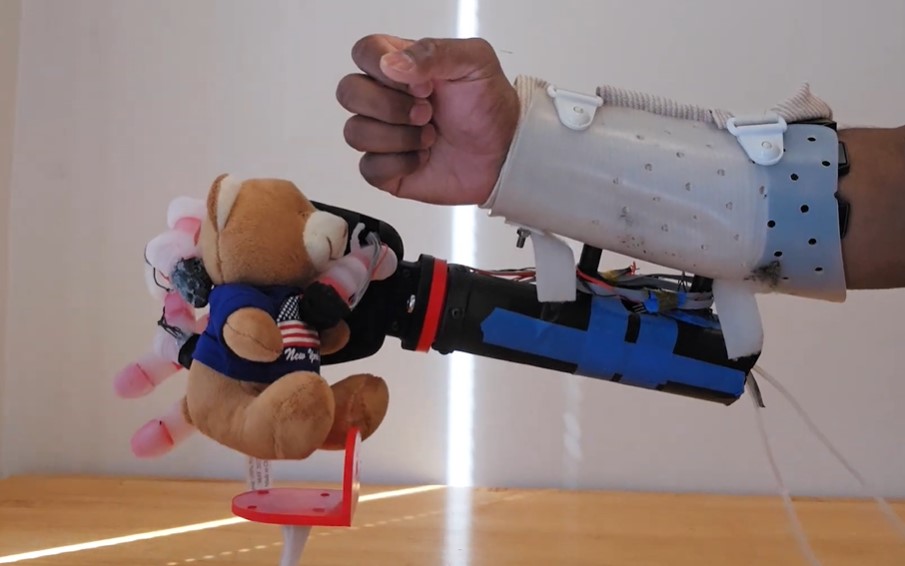
Durante os experimentos, a prótese foi testada com 15 objetos do cotidiano, incluindo:
Brinquedos de pelúcia
Esponjas de prato
Caixas de papelão
Abacaxis
Garrafas de água de metal
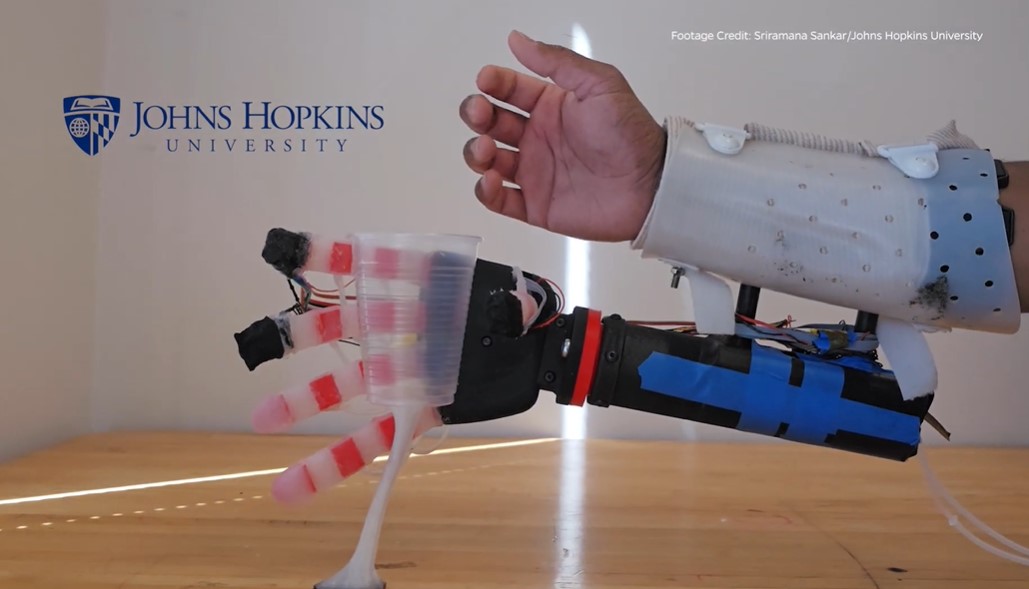
Copos de plástico frágeis cheios de líquido
Os resultados foram impressionantes: o dispositivo obteve 99,69% de precisão no manuseio dos objetos, ajustando automaticamente sua pegada para evitar acidentes. Em um dos testes mais impressionantes, a prótese segurou um copo de plástico fino com líquido usando apenas três dedos, sem amassá-lo ou derramar a bebida.
"Estamos combinando os pontos fortes da robótica rígida e macia para imitar a mão humana", afirmou Sankar. "A mão humana não é completamente rígida ou puramente macia - é um sistema híbrido. É isso que queremos que nossa prótese alcance."
Para ajudar os amputados a recuperar sensibilidade ao tocar objetos, as próteses necessitam de três componentes fundamentais:
Sensores para detectar o ambiente
Um sistema para converter os dados sensoriais em sinais semelhantes aos dos nervos
Uma forma de estimular os nervos do usuário para gerar uma sensação realista de toque
Nitish Thakor, professor de engenharia biomédica da Johns Hopkins e coautor do estudo, destaca a importância desse sistema bioinspirado. "Nosso sistema é inspirado neuralmente - ele modela os receptores de toque da mão humana para produzir mensagens semelhantes aos sinais nervosos. Dessa forma, o 'cérebro' da prótese pode entender se algo está quente ou frio, macio ou rígido, ou se está escorregando da pegada."
Thakor enfatiza que essa tecnologia representa um salto tanto para próteses quanto para robótica industrial, que no futuro precisará lidar com materiais delicados como vidro e tecido. "Esse conceito de destreza híbrida é essencial para a próxima geração de próteses. As mãos robóticas do futuro precisam ser capazes de manusear objetos pesados e também lidar com materiais delicados, como brinquedos macios ou papel."
Os próximos passos para essa pesquisa incluem:
Aprimorar a força de preensão
Incorporar sensores adicionais
Desenvolver materiais mais avançados para maior durabilidade
A mão protética desenvolvida pela Universidade Johns Hopkins marca um avanço significativo na engenharia biomédica e robótica. Seu design inovador e sua capacidade de replicar o toque humano representam uma revolução para pessoas com perda de membros, proporcionando maior independência e qualidade de vida.
Com o progresso contínuo da tecnologia, essas próteses podem se tornar ainda mais sofisticadas, ampliando as possibilidades para milhões de pessoas ao redor do mundo.